RZUT OKIEM NA ROBOTA, PANEL STEROWANIA I OBSŁUGA
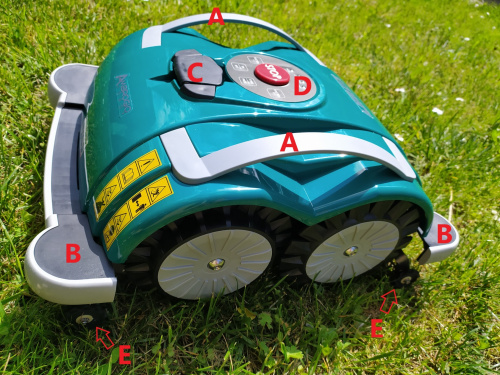
A - uchwyty do przenoszenia
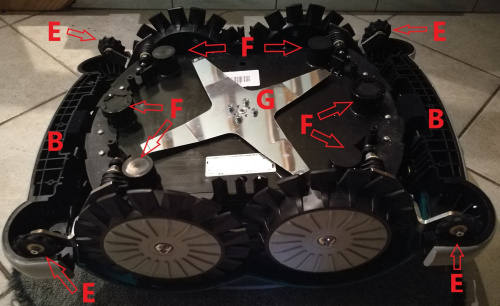
B - zderzaki
C - gniazdo ładowania
D - panel sterowania
E - czujniki uniesienia/spadku
F - czujniki wykrywające skoszony trawnik
G - ostrze 4-ramienne o średnicy 25cm
Oczywiście są też 4 koła, jakby ktoś nie zauważył

Jeśli chodzi o obsługę "Ambrożego" (bo tak został nazwany, była jeszcze propozycja BOBASA

), to mamy do wyboru sterowanie bezpośrednio z robota lub poprzez aplikację.
Sam robot posiada na obudowie 5 przycisków oraz 4 diody świecące na różne kolory

ON/OFF -tradycyjnie włączanie i wyłączanie
STOP - służy oczywiście do natychmiastowego zatrzymania robota i noża tnącego.
START/PAUSE - uruchamia robota i czasowo zatrzymuje
FUNCTION 1/FUNCTION 2 - przyciski służące do uruchamiania zaprogramowanego trybu pracy robota (programowania dokonuje się z poziomu aplikacji)
Diody:
Niebieska - w zależności od tego czy miga czy świeci na stałe, pokazuje jaka funkcja zaprogramowana w pilocie została wybrana.
Czerwona - wskazuje na ewentualne usterki czy uszkodzenia (ilość mignięć) oraz świeci się po naciśnięciu przycisku STOP
Zielona - pokazuje poziom naładowania baterii.
Pomarańczowa - pokazuje zatrzymanie robota przy niskim stanie baterii, tryb STANDBY, informuje, że trawnik jest skoszony lub, że go nie ma.
Moim skromnym zdaniem liczenie ilości mignięć i szukanie w instrukcji (bo nie sądzę, aby ktoś to zapamiętał), to trochę mało praktyczne rozwiązanie. Szczęśliwie niektóre rzeczy można zobaczyć w aplikacji do której właśnie dochodzimy.
Aplikację pobieramy ze sklepu Google Play lub Apple Store w zależności czym dysponujecie.
U mnie akurat telefon jest z Androidem, więc pokażę Wam tą aplikację.
Małe wyjaśnienie 18.05.2020 nastąpiła aktualizacja aplikacji, więc zdjęcia są i z poprzedniej wersji (z szarym paskiem i nowej z zielonym paskiem u góry).
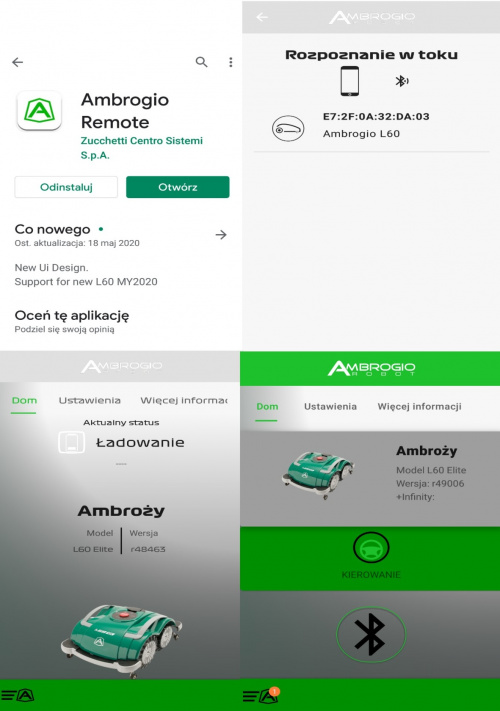
Po pobraniu aplikacji, należy się zalogować, do wyboru jest tylko możliwość przez Facebook lub Google, trzeba włączyć kosiarkę, wyszukać ją za pomocą aplikacji poprzez Bluetooth nazwać naszego przyjaciela i można przystąpić do konfiguracji.
Przyznam, że byłam nieco przerażona poprzednią wersją, gdyż była jakby niedostosowana do każdego modelu telefonu. Na dużych ekranach widać było wszystko, natomiast na małych niestety obcinało część tekstu czy funkcji. Szczęśliwie wraz z nową aktualizacją problem został rozwiązany i teraz na każdym urządzeniu wszystkie opisy i funkcje są dobrze widoczne.
Udało mi się również wgrać nowe sterowniki na płytę główną kosiarki, co przy poprzedniej wersji było niemożliwe, gdyż pojawiał się komunikat, że dla tego konkretnego modelu funkcja aktualizacji jest niedostępna. Tak więc duży plus za te zmiany. Zresztą nie tylko w tym zakresie, bo i opisy i funkcjonalność została znacznie poprawiona i na pewno jest to bardziej czytelne i intuicyjne. Co jest o tyle istotne, że instrukcja obsługi niewiele mówi na temat aplikacji i w zasadzie w poprzedniej wersji było więcej zgadywanek i dochodzenia metodą prób i błędów.
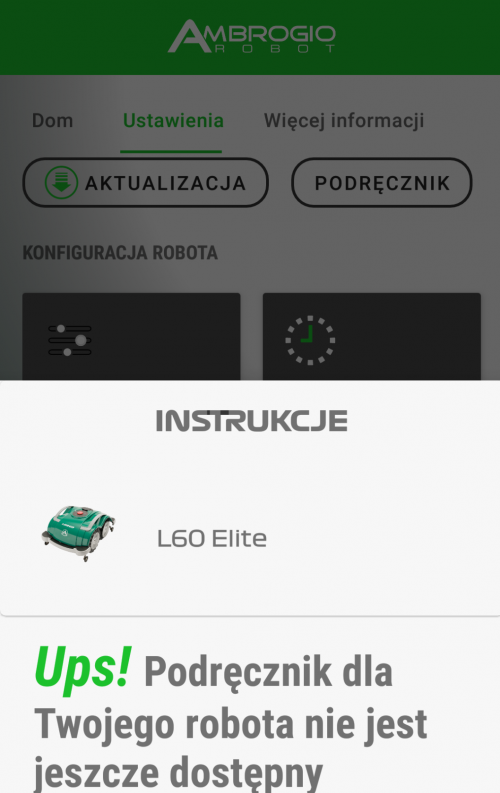
Co się nie zmieniło? Nadal nie ma instrukcji obsługi dla L60, co akurat mogłoby być przydatne w przypadku odgadywania znaczenia migających diod
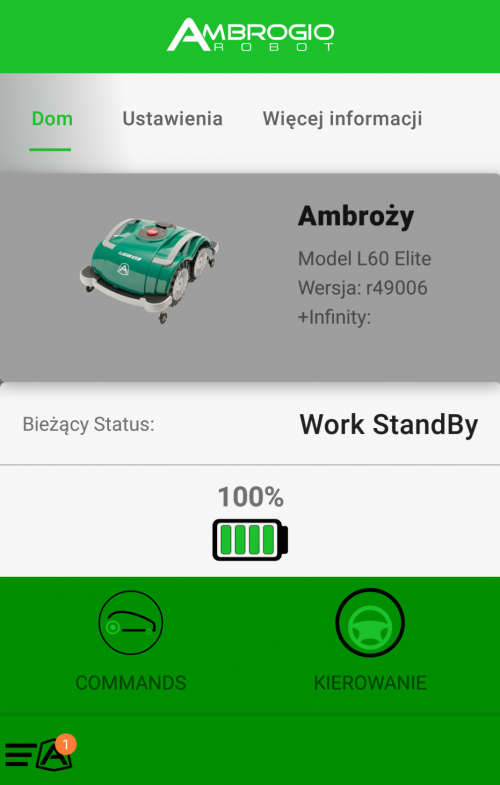
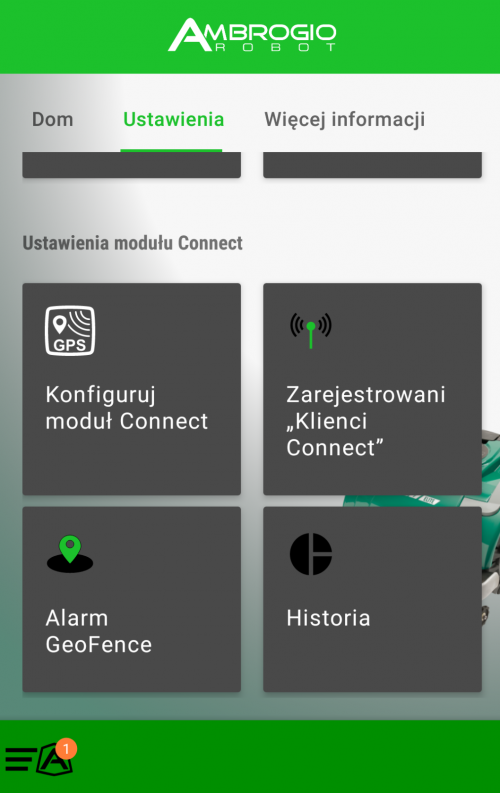
Co widać w aplikacji i co możemy ustawić?
1/ przede wszystkim widać poziom naładowania baterii i co kosiarka aktualnie robi, możemy wybrać sterowanie ręczne lub komendy głosowe (nie testowałam, ale wydaje mi się, że chodzi o system rozpoznawania mowy Alexa)
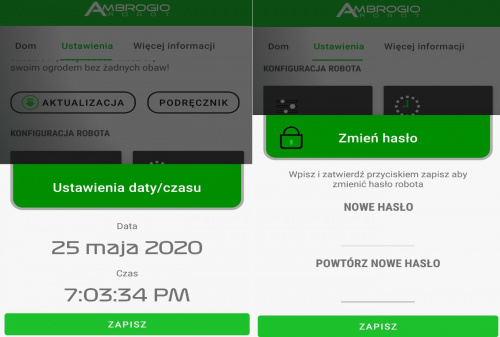
2/ w ustawieniach możemy zaktualizować robota, podręcznika jak już wspominałam brak, a dalej mamy ustawienie robota, datę i czas, historię oraz zmień hasło
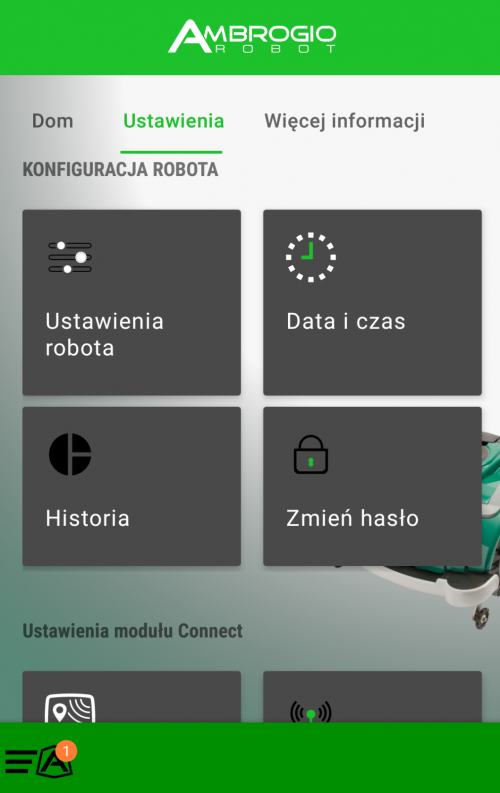
Data i czas oraz hasło, to nie wymaga wyjaśnienia
Możemy ustawić czułość koszenia trawy. Przedtem można było to jedynie skokowo ustawić (np. -10, +5), teraz mamy płynną regulację (-11,-10,-9...), a także tryb eco oraz blokada robota (ustawienie jej powoduje dezaktywuje możliwość włączenia robota za pomocą przycisków na obudowie)

Mały komentarz do czułości koszenia trawy. Wydaje mi się, że to należy ustawić przed koszeniem. Podczas koszenia próbowałam wielokrotnie przestawiać czułość, jednak zachowanie robota nie zmieniało się. A zatem prawdopodobnie zmiana parametrów podczas rozpoczętego koszenia nie będzie działała. Szkoda, bo testując robota nie wiem jaka czułość jest dla danego miejsca odpowiednia. Zakres jest, ale nie wiem co to konkretnie oznacza. Fajnie byłoby jakby było jakieś określenie np. zmiana o 1, to np. +/-1cm za trawnik. A tak trochę na dwoje babka wróżyła.
F1 i F2 odnoszą się do zaprogramowania przycisków na kosiarce o czym wcześniej wspominałam. Możemy ustawić godzinę rozpoczęcia i zakończenia pracy w pewnych widełkach czasowych. I tu duży minus. Mam drobne palce, ale zabawa w ustawianie strzałeczki na start i kwadracika na koniec to kompletnie niepraktyczna rzecz. Nie chcę myśleć jak ktoś ma większe ręce. Po chwili prób, człowiek ma już dość, przeskakują te godziny, na dodatek często zamiast 3 godziny końca wychodzi 12 godzin. To kompletnie nieintuicyjnie, 15 minut zabawy z czymś co może zająć pół minuty. Nie, nie, nie i jeszcze raz NIE. Proszę i sugeruję zrezygnowanie z tego na rzecz zwykłego wybrania godziny i minuty, choćby jak w zwykłym minutniku na androidzie. Oczywiście za 15 razem już wie się o co chodzi i jakoś to idzie, ale zdecydowanie to niepotrzebne komplikowanie prostej rzeczy. Poprzednia wersja miała większą tarczę i było nieco łatwiej, ale i tak to kiepskie rozwiązanie.
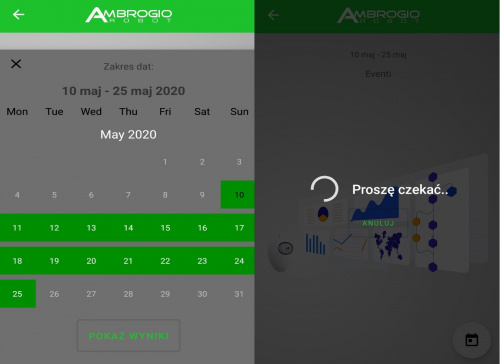
Opcja historia... no cóż, nie wiem co tam może być. Albo nie mam cierpliwości, żeby czekać, albo to nie działa. Tyle udało mi się uzyskać.
Jeśli ktoś zainwestuje w dodatkowy moduł (trochę ponad tysiąc złotych), to są jeszcze dodatkowe opcje, w tym przypadku nieaktywne
3/ Zakładka więcej informacji
Z tego nie skorzystamy bez dodatkowego modułu
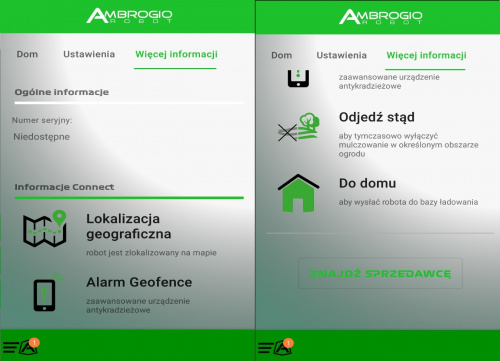
Możemy zobaczyć za to 2/3 informacje o robocie
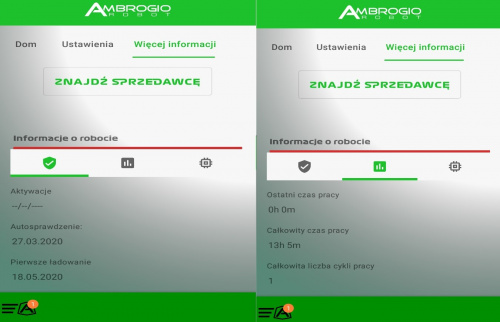
Wydaje mi się, że to wymaga dopracowania, bo o ile data pierwszego ładowania jest zgodna i wygląda na to, że mniej więcej czas pracy jest OK, to zupełnie nie rozumiem co oznacza całkowita liczba cykli i do czego służy ostatni czas pracy, skoro pokazuje 0:00, no chyba, że to się resetuje za każdym włączeniem i wyłączeniem robota. To wymaga jeszcze przetestowania, żeby odpowiedzieć na te pytania.
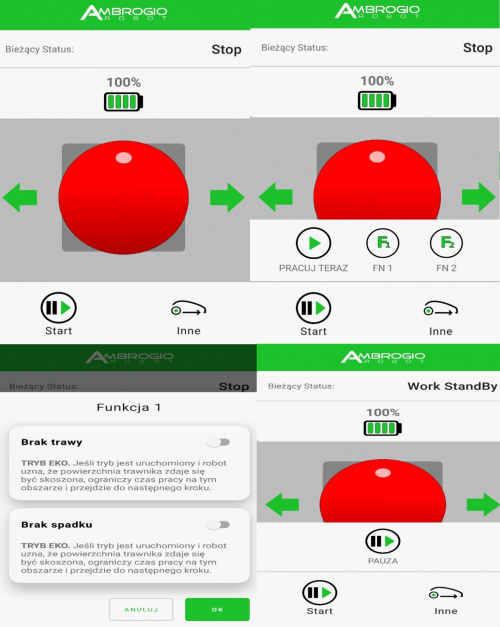
Zanim pokażę jak kierować ręcznie, to może małe wprowadzenie. Kosiarka porusza się do przodu i do tyłu. Jak odbija się od przeszkody lub przy zjedzie z trawy, to zmienia kierunek, jeździ losowo. Czasami jedzie dłuższy czas w jednym kierunki, a potem zmienia kierunek i znów jedzie dłuższy kawałek. Jakbym miała porównać do czegoś, to trochę mi się kojarzy z wcześniejszymi modelami Roomby np. serie 5xx, 6xx. Ale...
No właśnie, to
ALE w kwestii poruszania się dwukierunkowego ma niestety też swoje odbicie w sterowaniu.
Możecie sterować robotem jedynie w prawo lub w lewo, a on jeździ do przodu lub do tyłu. Producent nie przewidział w trybie manualnym możliwości poruszania kosiarką w 4 kierunkach. Wg mnie, to trochę słabe. Bo niby można ręcznie, ale nie do końca. Robot nie pojedzie dokładnie jak chcemy. I wg mnie tutaj powinna nastąpić w przyszłości zmiana. Jeśli decydujemy się oddać kosiarkę do sterowania ręcznego dajmy możliwość wyboru użytkownikowi kierunku, a nie maszynie.
I jeszcze mała dygresja, w trybie ręcznym można również ustawić klawisze funkcja 1 i funkcja 2, ale przyjmują one nieco inne parametry niż wcześniej. Nie do końca rozumiem zasadność tego w tym miejscu, czy w trybie automatycznym te funkcje nie działają? Widać Twórca miał jakiś głębszy zamysł umieszczając to tutaj.
CDN


